分析师/玲玲
校对/Tina
视频中,一个没有头、没有手的机器人正在“贴地飞行”。双腿快速摆动,躯干几乎与地面平行——这不是科幻电影,而是宇树科技最新发布的一段演示视频。

4月12日,宇树科技在B站和社交平台上同步更新动态,其人形机器人H1跑步速度达到每秒10米。宇树官方称,H1用“普通人的体质,跑出了世界冠军的速度”,再次刷新了人形机器人奔跑速度的世界纪录。
这条视频在B站迅速获得超过70万次播放,X平台浏览量也突破23万次。评论区里,网友的调侃充满想象力:“摸不着头脑”、“没有脑袋是为了降低风阻吗”、“以后骑H1上班”。
看似玩笑的背后,是一个严肃的技术突破:人形机器人的运动能力,正在逼近人类运动员的水平。
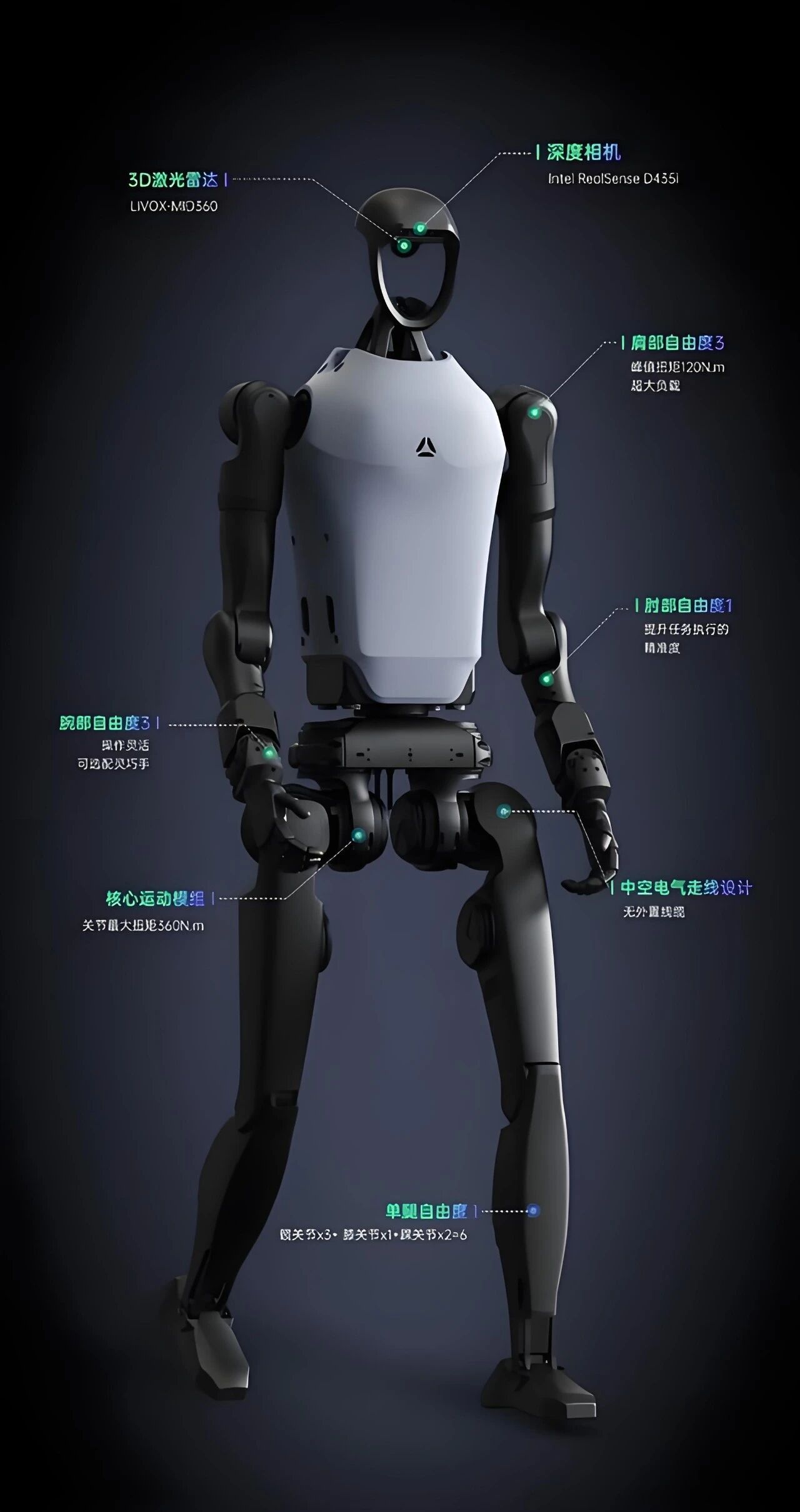
H1的形态颇为特殊——身高约1.8米,体重62公斤,与成年男性相仿,却只有躯干和双腿,没有头部和完整的手臂。这种“极简”设计并非为了噱头,而是运动性能优化的结果。
据宇树科技官网此前公布的H1-2技术参数,其单腿拥有6个自由度:髋关节3个、膝关节1个、踝关节2个。正是这种精细的关节控制能力,让H1能够实现接近人类步态的奔跑动作。
每秒10米是什么概念?
人类100米短跑的世界纪录保持者博尔特,在2009年柏林世锦赛创下的9秒58成绩中,最快分段速度约为每秒12.4米。H1的极速已经接近人类二级运动员水平(每秒10.5-11.5米)。
有专业网友在B站评论区换算:H1的速度达到每小时36公里,比新国标电动自行车的最高限速(每小时25公里)还要快。这意味着,如果H1参加城市道路上的“人机赛跑”,不少电动车可能都会被甩在身后。
但宇树并不满足于此。视频中的H1下盘极低,奔跑时重心几乎贴近地面,实现了所谓的“贴地飞行”。这种低重心设计能提高稳定性,但也对平衡控制算法提出了更高要求。
X平台上有技术用户评论指出:“没有感知、驱动与学习策略之间的紧密协同,根本做不到如此流畅的表现。”这句话点出了H1背后的技术核心——不仅是硬件够强,更是软件算法的胜利。
宇树科技的这次突破,并非凭空而来。
熟悉机器人行业的人都知道,宇树最初是以四足机器人(机器狗)闻名。其Unitree系列产品,从早期的A1到后来的Go1、B2,在全球消费级和行业级市场都占有一席之地。

四足机器人需要解决的核心问题是复杂地形下的稳定移动。宇树在这条赛道上积累了丰富的运动控制经验——如何让机器人在不平整的地面行走、如何应对突发的外部干扰、如何优化能耗与速度的平衡。
这些经验,为人形机器人的研发铺平了道路。
人形机器人虽然只有两条腿,但运动控制的复杂度反而更高。人类行走时,身体重心在两腿之间不断转移,需要实时调整姿态来保持平衡。奔跑时更是如此——每一步都是短暂的腾空和落地冲击,对关节的瞬时扭矩和反应速度要求极高。
宇树的转型,反映了国内机器人产业的一个趋势:从专用机器人向通用机器人拓展。四足机器人适合特定场景(如巡检、安防),但人形机器人的想象空间更大——理论上,它能适应人类设计的一切环境,使用人类制造的一切工具。
宇树并非唯一在这个赛道上发力的玩家。
去年8月,在首届世界人形机器人运动会上,北京人形机器人创新中心的“具身天工Ultra”以21.50秒的成绩夺得100米短跑冠军。虽然这个成绩与H1的10米/秒尚有差距,但已经显示出国内团队在运动控制上的快速进步。

今年4月,另一家国内公司镜识科技发布新型全尺寸人形机器人Bolt,其跑步峰值速度同样达到了10m/s。
国际赛道上,波士顿动力的Atlas、特斯拉的Optimus、Figure的Figure 01等产品,也在不断刷新人们对人形机器人能力的认知。虽然这些产品的技术路径和设计哲学各不相同,但目标一致:让人形机器人真正“有用”。
这种竞争的升温,背后是应用场景的明确化。
过去,人形机器人更多是实验室里的“炫技”项目。但现在,随着制造业升级、老龄化加剧、劳动力成本上升,人形机器人在工业制造、物流配送、老年护理等领域的应用前景日益清晰。
运动能力是这些场景的基础。在工厂里,机器人需要快速在不同工位间移动;在仓库里,机器人需要搬运货物并避障;在家庭中,机器人需要上下楼梯、穿越门槛。
“跑得快”不仅仅是打破纪录,更是为了在实际应用中提升效率。有行业分析指出,如果人形机器人的移动速度能达到人类小跑水平(约每秒2-3米),其在仓储物流场景的效率就能提升30%以上。
虽然大家都在追求“跑得快”,但技术路线却各有侧重。
宇树的H1采用的是电机驱动方案。这种方案的优势是控制精度高、响应速度快,适合需要精细动作的场景。但缺点也很明显:功率密度相对较低,长时间高负荷运行容易过热。
波士顿动力的Atlas则采用液压驱动。液压系统的功率密度大,能输出更大的力量,适合跳跃、翻滚等高爆发力动作。但液压系统复杂、维护成本高,噪音也更大。
特斯拉Optimus走的是电机路线,但特别强调成本控制。马斯克曾表示,Optimus的目标是最终将成本降到2万美元以下,实现大规模量产。

国内团队大多选择电机路线,这与国内的供应链优势有关。中国的电机、减速器、控制器产业链相对成熟,能提供性价比高的解决方案。
但无论哪种路线,都面临一个共同挑战:能源效率。
人形机器人的能耗问题一直困扰着行业。目前主流产品的续航时间大多在1-2小时,远远达不到实用化要求。提高运动效率、优化能源管理,是各家都在攻关的课题。
H1的“低重心”设计,某种程度上也是为了降低能耗。重心越低,维持平衡所需的能量就越少。宇树在四足机器人上积累的节能算法,或许正在人形机器人上发挥作用。
破纪录不是终点,而是新竞赛的起点。
今年4月,2026北京亦庄人形机器人半程马拉松即将开赛。这是国内首次举办长距离人形机器人比赛,对机器人的续航能力、环境适应能力都是巨大考验。
半程马拉松约21公里,正常人完成需要1.5-2小时。对于目前续航普遍在1-2小时的人形机器人来说,这几乎是极限挑战。赛事不仅考验速度,更考验能源管理、热控制、故障容错等综合能力。
8月,第二届世界人形机器人运动会也将举行。相比首届,今年的参赛队伍更多、技术水平更高、竞争也更激烈。
有行业观察者预测,今年的人形机器人竞赛将呈现三个趋势:
一是从单项突破向综合能力演进。过去各家专注于某个单项(如跑步、跳跃),现在开始比拼全场景适应能力。
二是从实验室环境向真实场景迁移。比赛场地越来越接近真实世界,有坡度、有障碍、有不平整地面。
三是从硬件比拼向软件算法深化。早期大家拼电机功率、关节数量,现在更看重控制算法、学习能力、自主决策。
宇树H1的这次破纪录,可以看作是这个趋势的前奏。它证明了在特定场景下,人形机器人的运动能力已经接近人类水平。但真正的考验还在后面——能否在复杂环境中稳定工作,能否在长时间任务中保持性能,能否在突发情况下自主应对。
人形机器人的发展,正在经历一个从“能走”到“能跑”的关键跃迁。
宇树H1的每秒10米,不仅是一个数字,更是一个信号:这个行业的技术积累已经到了从量变到质变的临界点。
但我们需要清醒地看到,运动能力的突破只是第一步。人形机器人要真正“有用”,还需要解决感知、决策、操作、交互等一系列问题。一个能跑的机器人,如果看不清周围环境、不会使用工具、无法与人沟通,仍然只是实验室里的展品。
这也是为什么业内常说:“机器人最难的不是动起来,而是知道为什么动、怎么动、动了之后怎么办。”
宇树的选择——先攻克运动能力,再完善感知和操作——是一条务实的技术路径。在资源有限的情况下,集中力量突破最基础的难题,为后续发展奠定基础。
可以预见,随着运动能力的提升,人形机器人的应用场景会逐步打开。从简单的物料搬运,到复杂的设备操作;从结构化的工厂环境,到非结构化的家庭场景。
当机器人不仅能“走得好”,还能“跑得快”,甚至“跳得高”时,它们离真正走进我们的生活,就更近了一步。
而这一切,都始于一次次的“破纪录”。每一次速度的提升、每一次续航的延长、每一次成本的下降,都在为人形机器人的实用化铺路。
H1的“贴地飞行”,飞向的是一个机器人与人类协同工作的未来。在那个未来里,机器人不必像人一样思考,但需要像人一样行动——稳定、高效、可靠。
这才是所有奔跑的意义。